
Credit: Melanie Gonick, MIT
Чрез експерименти, включващи симулация на човешки хранопровод и стомах, изследователи от MIT, Университета на Шефилд и Технологичния институт на Токио, са демонстрирали миниатюрен оригами робот, който може да се разгръща, след като е бил погълнат под формата на капсула. Роботът се насочва от външни магнитни полета, може да пълзи по стомашната стена и да премахва погълнати батерии от тип „копче” („часовникарски”) или да „превърже” рана.
Новата разработка е представена от изследователите през месец май на Международната конференция по роботика и автоматизация (International Conference on Robotics and Automation). В екипа участват Daniela Rus, професорите Andrew и Erna Viterbi от Катедрата по електротехника и компютърни науки на MIT и други.
Специално предложение:
„Много е вълнуващо да виждаме как нашите малки оригами роботи извършват нещо с потенциално важно приложение за здравето на хората” – казва Rus, която ръководи Лабораторията по компютърни науки и изкуствен интелект (CSAIL) към MIT. „За приложения вътре в тялото, имаме нужда от малка, контролируема и свободно подвижна роботизирана система. Много е трудно да се контролира и да се постави робот вътре в тялото, ако той е прикрепен към външни обекти.”
Въпреки че новият робот е наследник на друг, представен на същата конференция миналата година, дизайнът му е много по-различен. Подобно на предшественика си, той може да се придвижва, чрез така нареченото “stick-slip” движение, при което израстъците му се прикрепват към повърхността чрез триене, когато извършва ход, а се освобождават отново, когато тялото се огъва, за да промени разпределението на теглото си.
Като предшественика си – и като няколко други оригами робота на екипа на Rus – новият робот е изработен от два слоя структурен материал, между които се разполага друг материал, който се свива при нагряване. Нанесени са прорези върху външните слоеве, които определят как ще се огъва роботът, когато се свие междинният слой.
Предвиденото приложение на робота също продиктувало множество структурни модификации. „Stick-slip работи само, когато роботът е достатъчно малък и достатъчно плътен (в смисъла на скованост или твърдост)” – казва Steven Guitron от екипа. “Оригиналният дизайн на Mylar е много по-плътен от новия, който е базиран на биологично съвместим материал.”
За да компенсират относителната податливост (в смисъла на гъвкавост), изследователите трябвало да измислят дизайн, който изисква по-малко прорези. В същото време, гънките на робота увеличават плътността си по дължината на определени оси.
Credit: Melanie Gonick, MIT
Но тъй като стомахът е изпълнен с течност, дизайнът на робота не разчита изцяло на движението stick-slip. „Според нашите изчисления, 20% от движението напред се дължи на отместване на водата, а 80% на движението stick-slip” – казва Shuhei Miyashita, който е бил част от екипа при разработката на робота. „В тази връзка, ние активно използвахме и приложихме концепцията и характеристиките на перката към дизайна на робота, което се вижда от относително плоската му структура.”
Освен това, трябваше да бъде възможно роботът да се свие достатъчно, за да може да се побере в капсула, която да бъде погълната. Аналогично, когато капсулата се разтвори, силите, които действат на робота трябва да бъдат достатъчно мощни, за да го накарат да се разгъне напълно. На принципа „проба-грешка” учените в крайна сметка проектирали правоъгълен робот, нагънат като хармоника, чиито гънки са с прищипнати ъгли, които действат като точки на тракция.
В центъра на една от гънките се намира магнит, който реагира на изменящите се магнитни полета извън тялото, които контролират движенията на робота. Прилаганите сили като цяло са ротационни. Бързо завъртане го кара да се завърти на място, а по-бавно – да се завърти около един от фиксираните си израстъци. В експериментите на изследователите, роботът използва същия магнит, за да вземе батерията от тип „копче”.
Учените изпробвали десетина различни варианта за структурен материал, преди да се спрат на сушените свински черва, които се използват като обвивка на надениците. „Прекарахме много време по азиатските пазари и пазара на Китайския квартал, в търсене на материали” – казва Shuguang Li от CSAIL. Свиващият се слой е биоразградим целофан, наречен Biolefin.
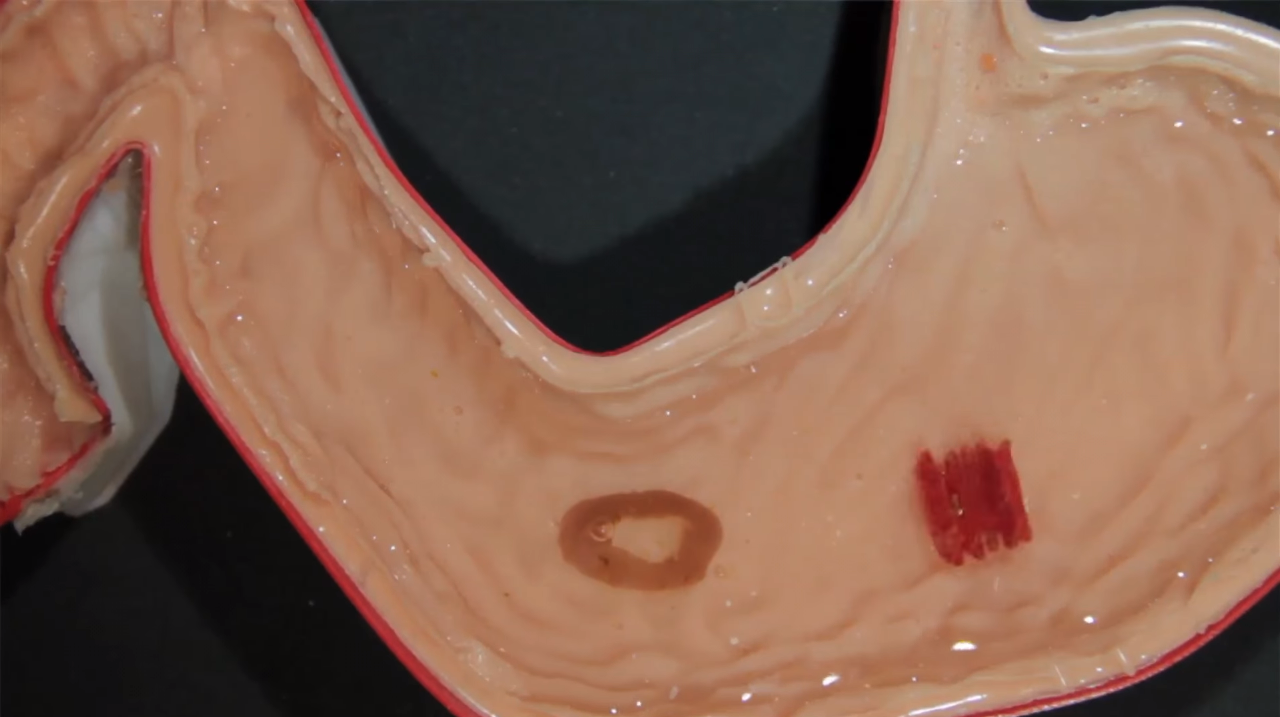
За да проектират синтетичния стомах, изследователите купили свински такъв и изследвали механичните му свойства. Моделът им представлява напречен разрез на стомах и хранопровод, направен от силиконов гума със същия механичен профил. Смес от вода и лимонов сок симулира киселинната среда в стомаха.

Батерии от типа „копче“. Credit: Gerhard H Wrodnigg (CC BY-SA 2.5)
Само в САЩ всяка година се докладват по 3500 случая на погълнати батерии от типа „копче”. Често батериите нормално преминават през гастро-интестиналния тракт, но ако се задържат по-дълго в контакт с тъканите на хранопровода или стомаха, те може да доведат до изгаряне на тези тъкани. Miyashita използвал хитра стратегия, за да докаже на Rus, че отстраняването на погълнати батерии и лечението на последващите рани е убедително приложение на оригами робота им.
„Shuhei купи парче шунка и постави батерията върху него” – разказва Rus. „След половин час батерията беше напълно потънала в шунката. И това ме накара да осъзная, че наистина е важно. Ако имаш батерия в тялото си, то тя определено трябва да се извади възможно най-бързо.”
„Концепцията е едновременно много креативна и много практична и е насочена към разрешаване на този клиничен проблем по много елегантен начин” – казва Bradley Nelson, професор по роботика от Швейцарския федерален технологичен институт в Цюрих. „Това е едно от най-убедителните приложения на оригами робот, което някога съм виждал.”


